Việc kết nối và cấu hình dòng Servo Lexium 28 (LXM28) của Schneider Electric trở nên đơn giản hơn bao giờ hết nhờ phần mềm SoMove. Trong bài viết này, chúng tôi sẽ hướng dẫn bạn từng bước từ khâu thiết lập COM Port đến việc giám sát I/O thực tế.
1. Kiểm tra kết nối phần cứng và COM Port
Trước tiên, bạn cần sử dụng cáp chuyển đổi USB – RJ45 chuyên dụng của Schneider để kết nối cổng Modbus trên LXM28 với máy tính.
- Bước 1: Cắm cáp vào máy tính.
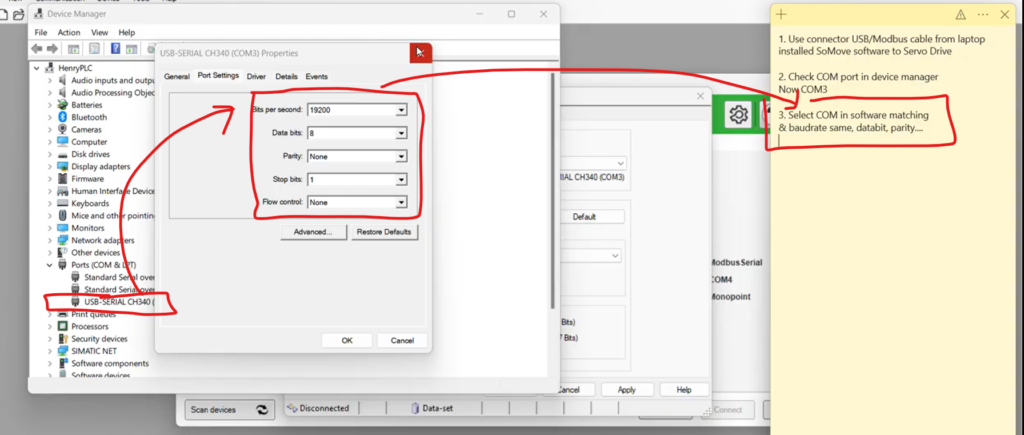
- Bước 2: Mở Device Manager trên Windows.
- Bước 3: Tại mục Ports (COM & LPT), xác định đúng tên driver (thường là USB-SERIAL CH340) và số thứ tự cổng (Ví dụ: COM3).
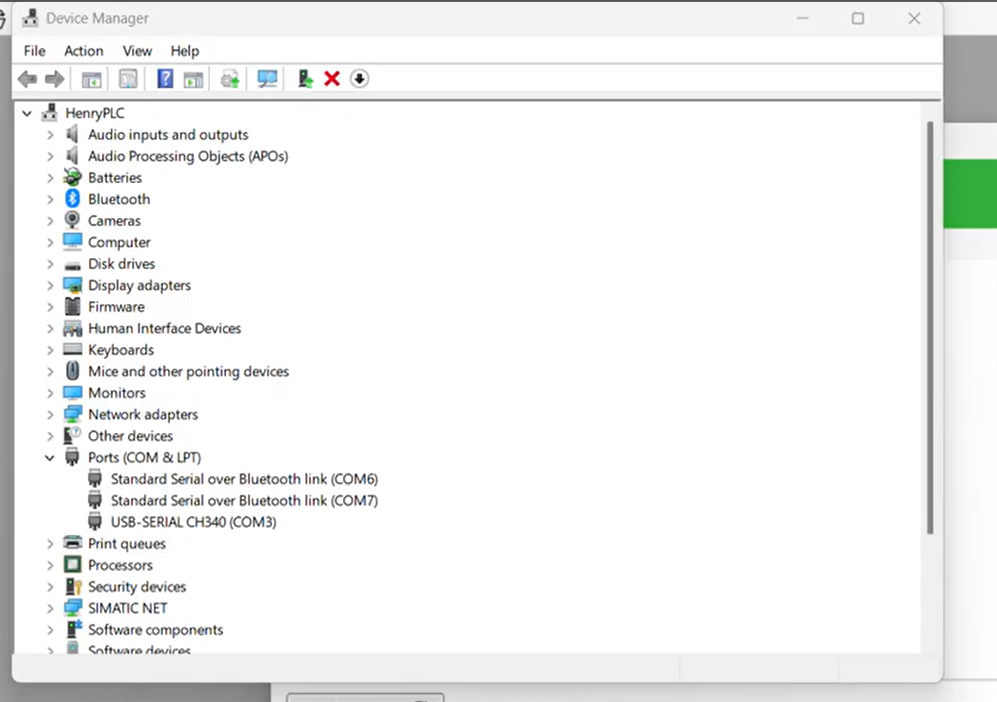
Lưu ý: Việc xác định đúng số COM Port là điều kiện tiên quyết để phần mềm SoMove có thể nhận diện thiết bị.
2. Thiết lập cấu hình kết nối trên SoMove
Sau khi đã biết số cổng COM, bạn tiến hành cấu hình trong phần mềm SoMove:
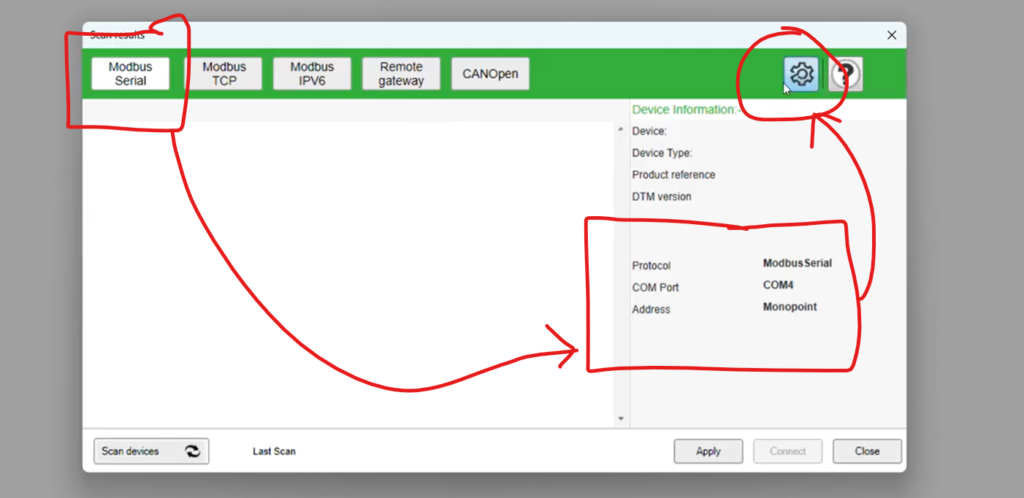
- Mở SoMove và chọn tab Modbus Serial.
- Nhấn vào biểu tượng Bánh răng (Settings) để vào phần Advanced Settings.
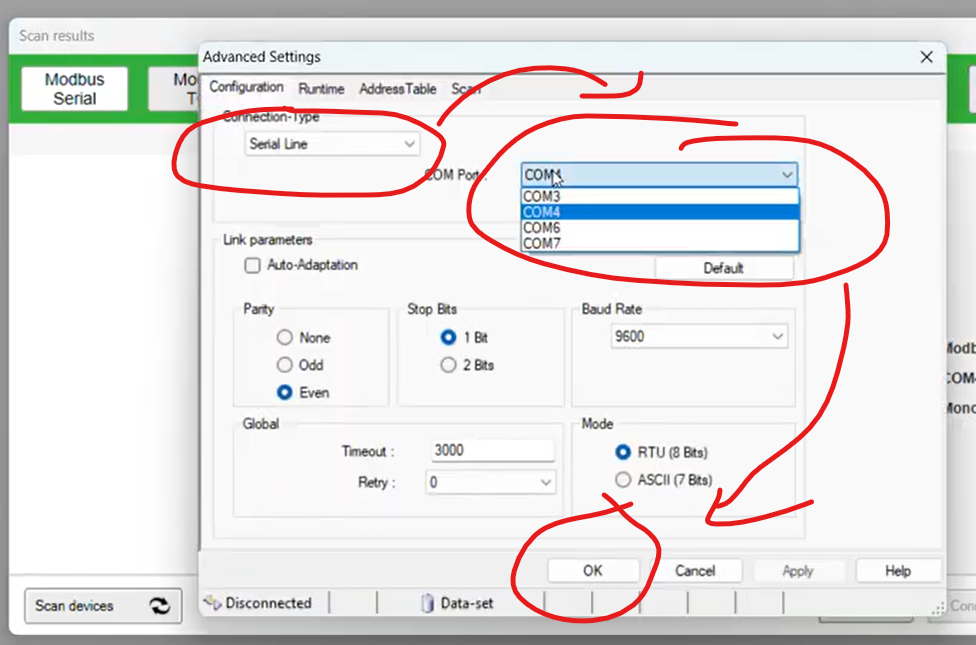
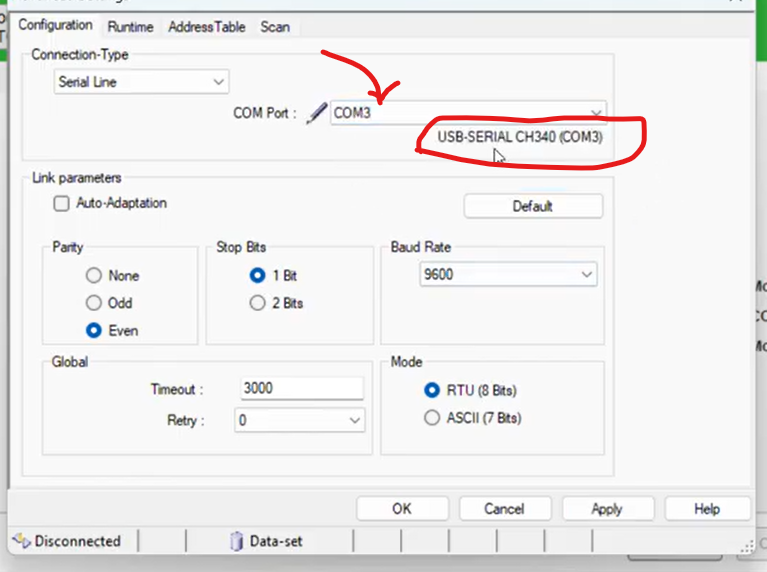
- Tại mục Connection-Type, chọn Serial Line.
- Trong menu COM Port, chọn đúng cổng đã kiểm tra ở bước 1 (Ví dụ: COM3).
- Kiểm tra các thông số kỹ thuật (Baud rate, Parity, Stop bits) để đảm bảo khớp với thiết lập của Driver. Thông thường mặc định là:
- Baud Rate: 9600 hoặc 19200.
- Parity: Even.
- Stop Bit: 1 Bit.
3. Quét thiết bị và Đồng bộ hóa dữ liệu (Scan Device)
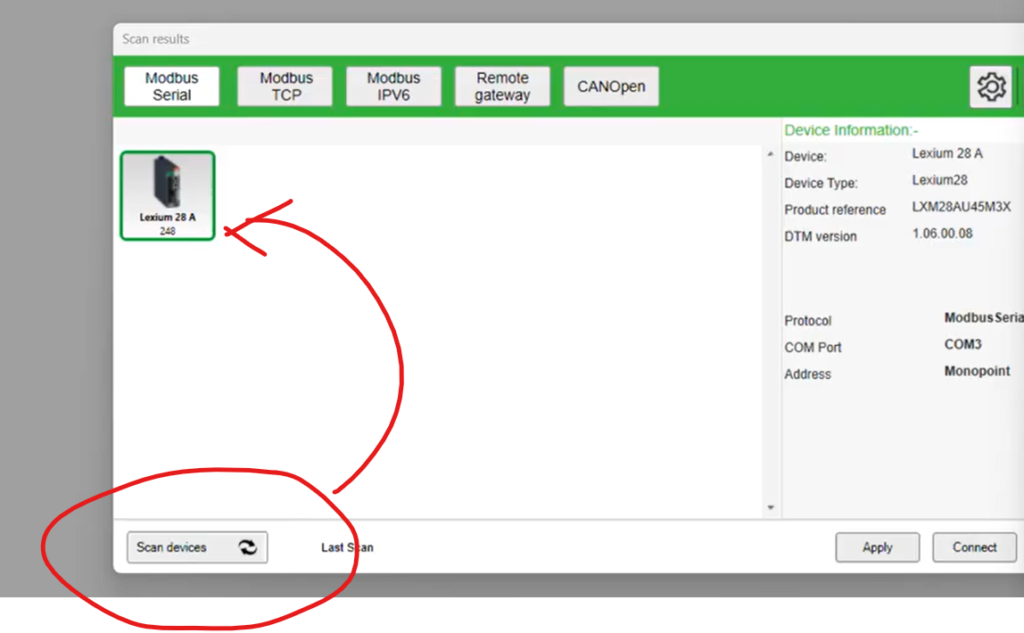
Khi các thông số đã khớp, bạn nhấn nút Scan Devices. Phần mềm sẽ tự động tìm kiếm các thiết bị đang kết nối trên đường truyền.
- Nếu kết nối thành công, biểu tượng Lexium 28 sẽ xuất hiện cùng mã sản phẩm cụ thể (Ví dụ: LXM28AU45M3X).
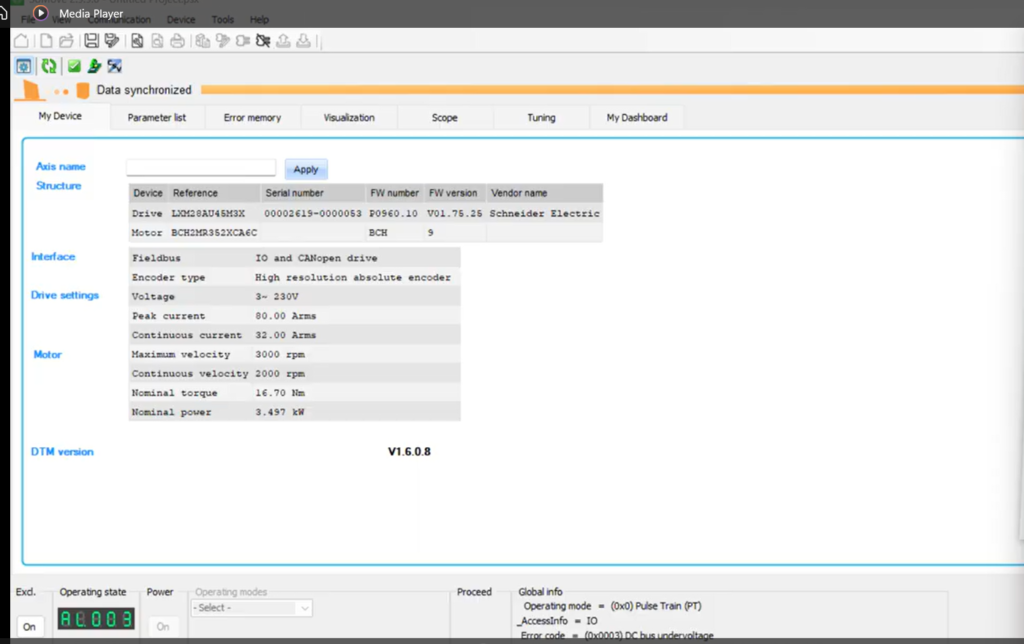
- Nhấn Connect và thực hiện Store to PC để tải toàn bộ cấu hình từ Servo lên máy tính. Lúc này, thanh trạng thái sẽ báo “Data synchronized”.
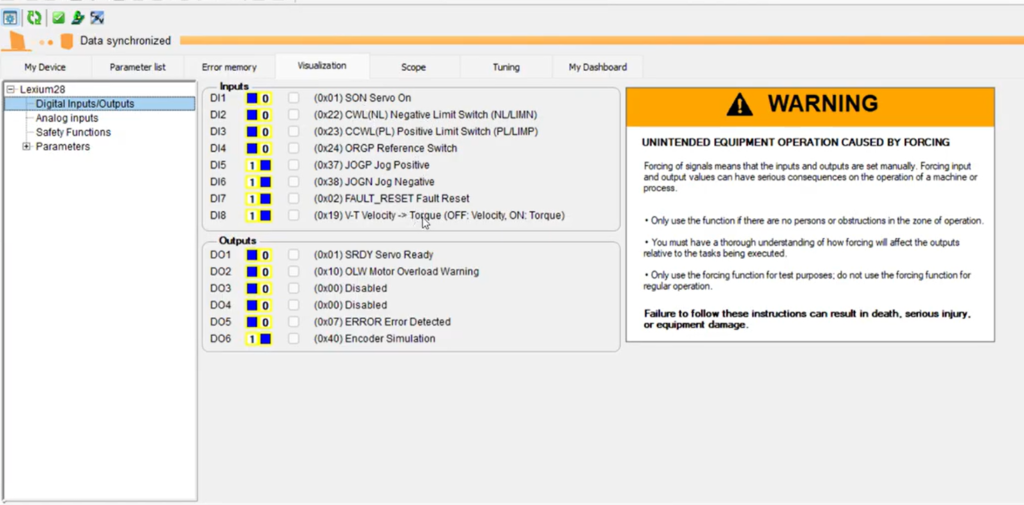
4. Cấu hình các chức năng Digital Input & Output (I/O)
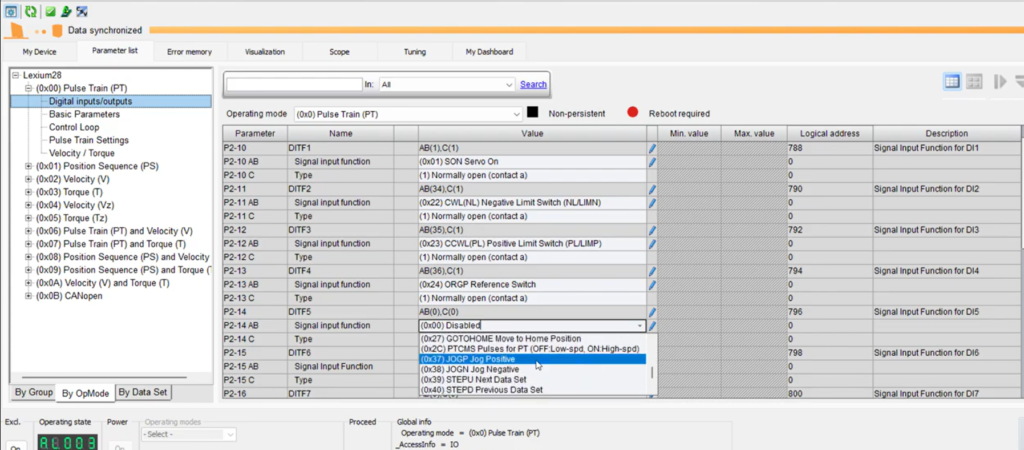
Đây là bước quan trọng để điều khiển Servo theo ý muốn. Trong tab Parameter List, chọn mục Digital inputs/outputs:
- Gán chức năng cho DI: Bạn có thể tùy chỉnh các chân DI1 đến DI8. Ví dụ:
- DI1: SON (Servo On).
- DI5: JOGP (Jog Positive).
- DI6: JOGN (Jog Negative).
- Cài đặt trạng thái: Chọn loại tiếp điểm là Normally Open (thường hở) hoặc Normally Closed (thường đóng) tùy theo sơ đồ đấu nối thực tế.
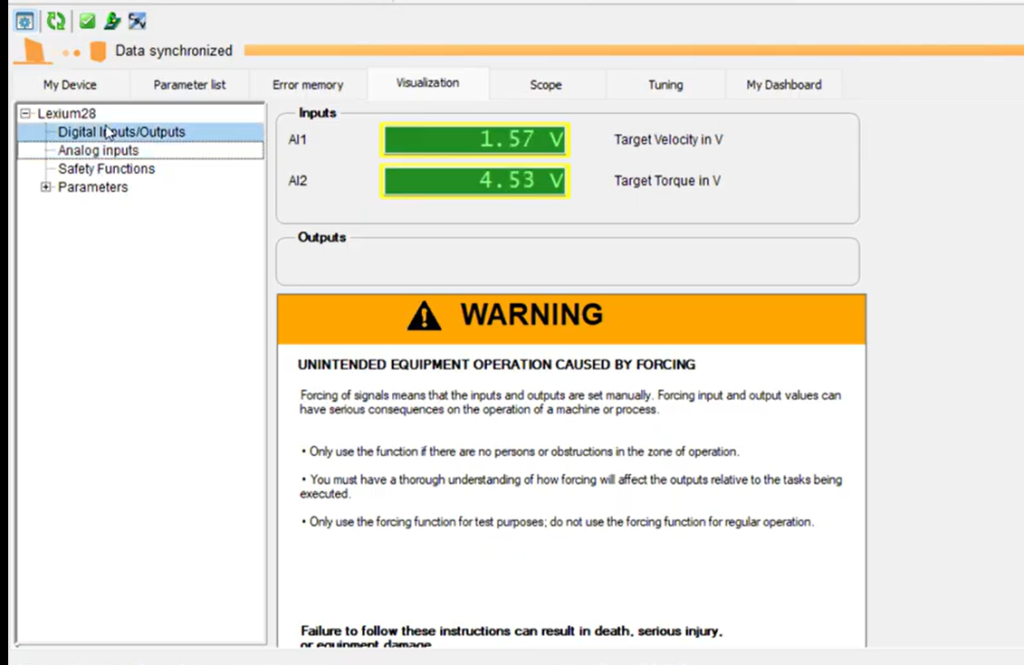
5. Giám sát hệ thống qua Visualization
SoMove cung cấp giao diện trực quan tại tab Visualization giúp bạn kiểm tra trạng thái vận hành mà không cần đo đạc thủ công:
- Analog Inputs: Theo dõi điện áp thực tế tại các chân AI1, AI2 (Ví dụ: Target Velocity/Torque in V).
- Digital I/O Status: Các đèn báo màu xanh/vàng giúp bạn biết chính xác tín hiệu nào đang ON hoặc OFF.
- Cảnh báo an toàn: Hãy lưu ý các cảnh báo về Unintended Equipment Operation khi thực hiện cưỡng bức (Forcing) tín hiệu để đảm bảo an toàn cho người và thiết bị.
Hướng Dẫn Tutorial (Phần 2): Chạy Thử Jog Và Cài Đặt Chế Độ Vận Hành Cho Servo Lexium 28
Sau khi đã kết nối và cấu hình I/O thành công, bước tiếp theo là kiểm tra vận hành thực tế của động cơ thông qua phần mềm SoMove.
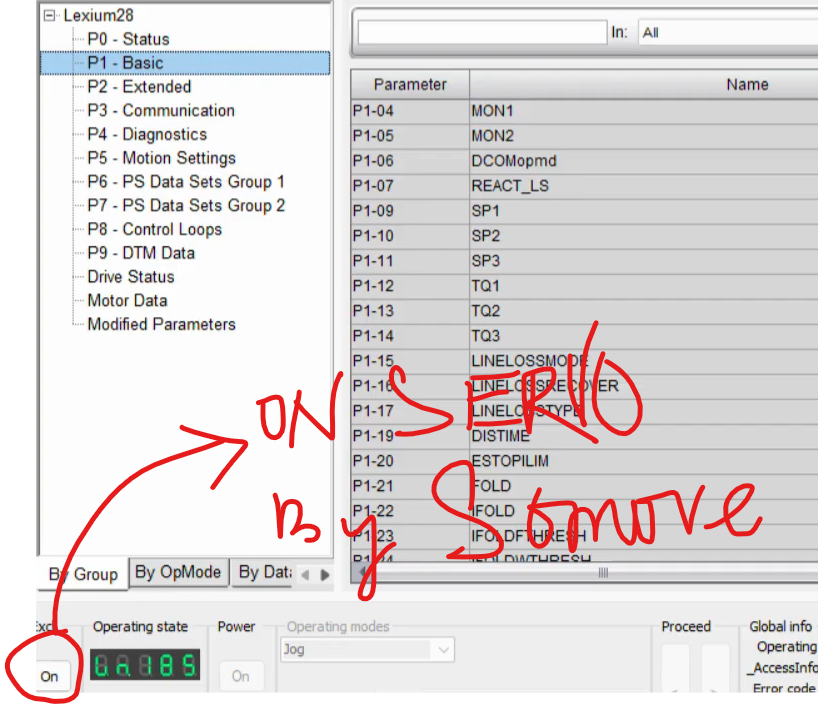
1. Kích hoạt trạng thái Servo On bằng phần mềm
Để điều khiển được động cơ, bạn cần đưa Driver về trạng thái sẵn sàng (Ready).
- Thao tác: Quan sát góc dưới bên trái màn hình SoMove, nhấn vào nút “On” tại mục Operating State.
- Trạng thái: Khi nút chuyển sang màu xanh và màn hình hiển thị trạng thái động cơ. Servo đã được cấp nguồn giữ từ (Servo On).
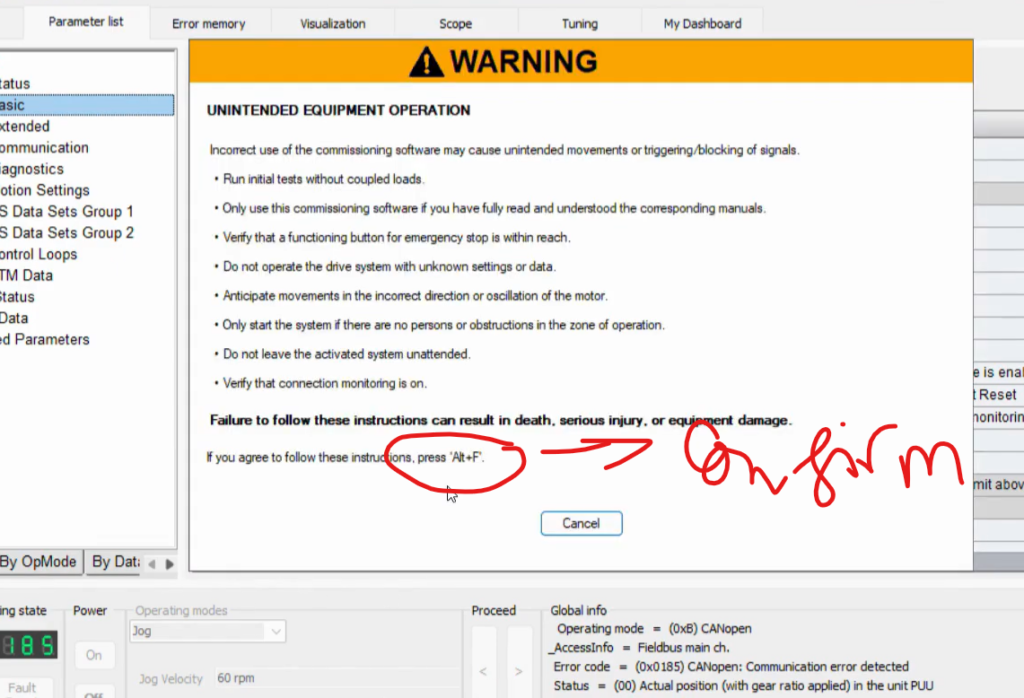
2. Xác nhận cảnh báo an toàn (Confirm Warning)
Khi bạn thực hiện các thao tác điều khiển trực tiếp từ máy tính, một bảng cảnh báo “UNINTENDED EQUIPMENT OPERATION” sẽ xuất hiện.
- Nội dung: Cảnh báo về việc động cơ có thể chuyển động bất ngờ.
- Thao tác: Bạn cần đọc kỹ và nhấn tổ hợp phím “Alt + F” để xác nhận đồng ý tiếp tục. Đây là bước bắt buộc để kích hoạt quyền điều khiển từ phần mềm.
3. Kiểm tra vận hành ở chế độ Jog
Chế độ Jog giúp bạn kiểm tra chiều quay và tốc độ của động cơ mà không cần lập trình phức tạp.
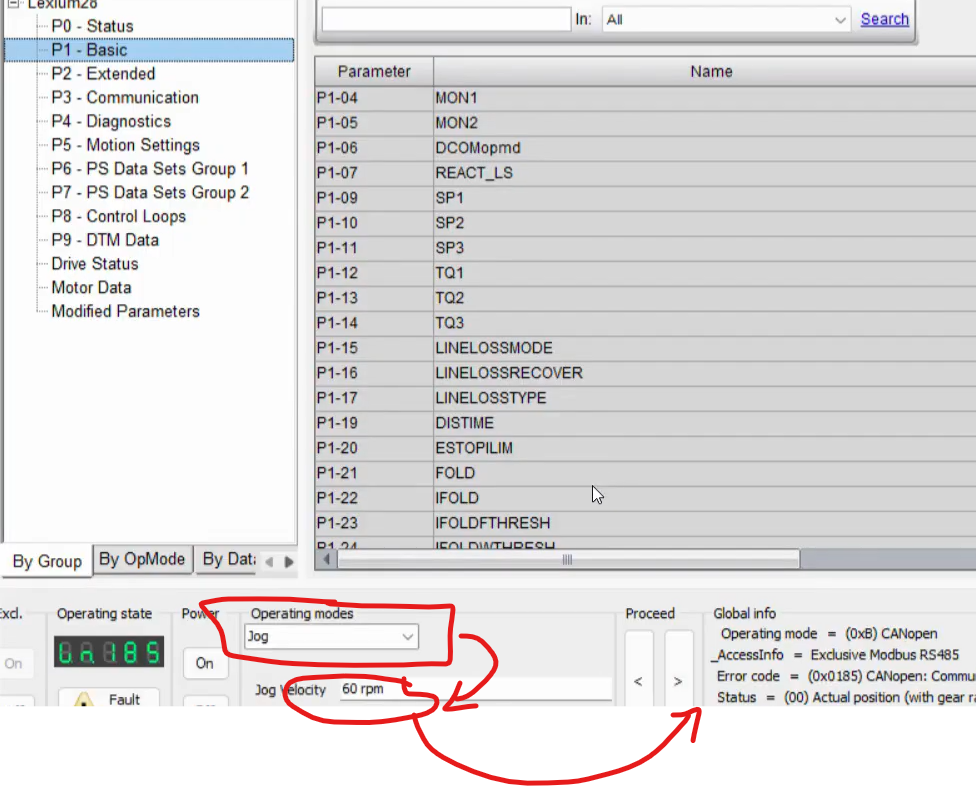
- Thiết lập: 1. Tại mục Operating modes, chọn Jog. 2. Nhập tốc độ mong muốn tại ô Jog Velocity (Ví dụ:
60 rpm). - Điều khiển: Nhấn giữ nút mũi tên sang phải
>để quay thuận hoặc mũi tên sang trái<để quay nghịch.
4. Giám sát thông số vận hành thực tế (Monitoring)
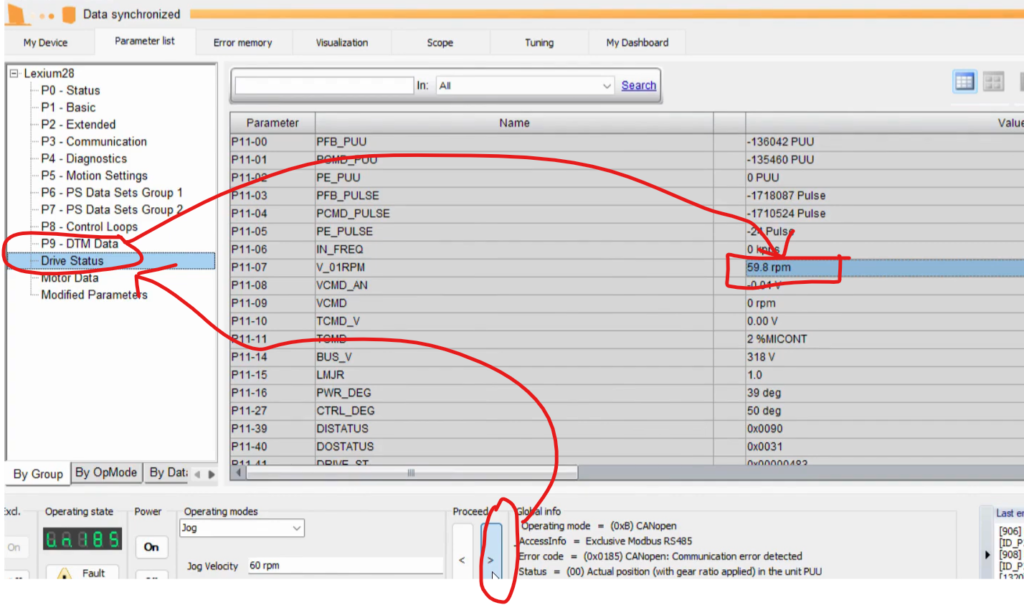
Để biết động cơ có đang chạy đúng tốc độ cài đặt hay không, bạn vào mục Drive Status trong cây thư mục bên trái:
- Quay thuận: Kiểm tra thông số V_01RPM (P11-07). Nếu bạn cài 60 rpm, thông số sẽ hiển thị xấp xỉ
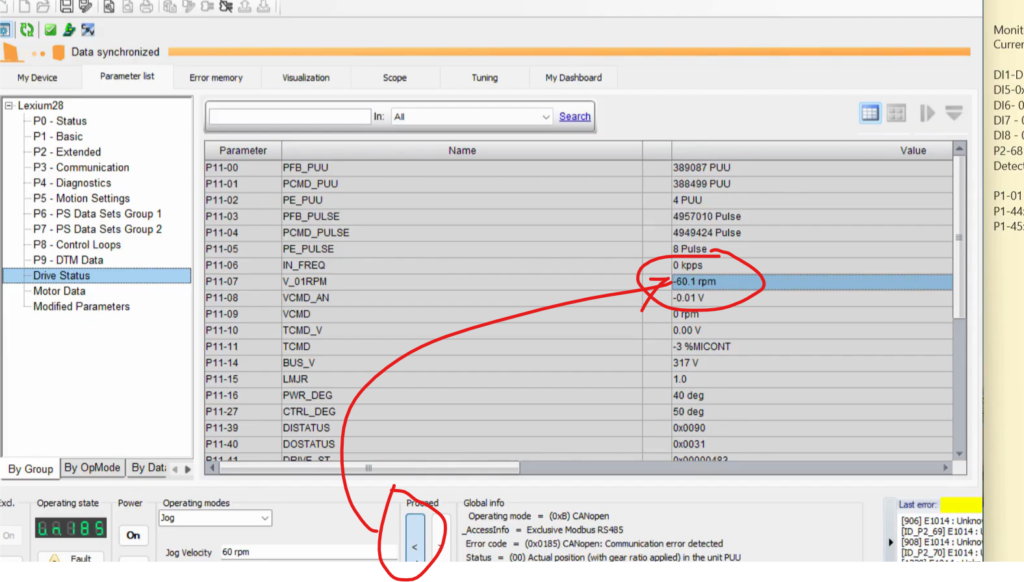
59.8 rpm. - Quay nghịch: Khi nhấn nút Jog chiều ngược lại, thông số sẽ hiển thị giá trị âm (Ví dụ:
-60.1 rpm).
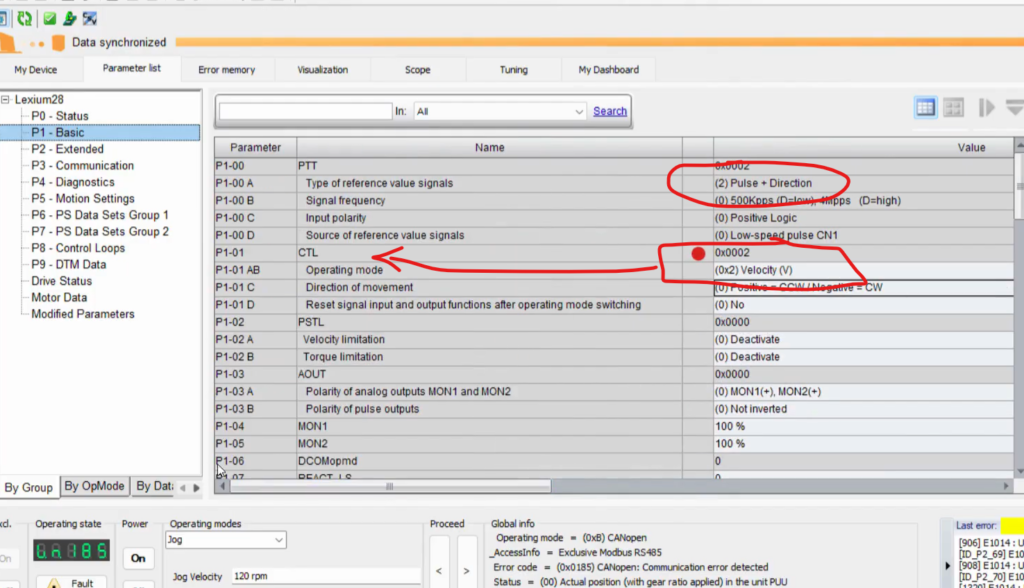
5. Cấu hình các chế độ vận hành (Basic Config)
Trong mục P1 – Basic, bạn có thể thay đổi cách thức Driver nhận lệnh điều khiển:
- Chế độ Vận tốc (Velocity Mode): Tại thông số P1-01 (CTL), chọn giá trị
(0x2) Velocity (V). Ở chế độ này, Servo sẽ chạy theo điện áp Analog hoặc tốc độ cài đặt sẵn. - Chế độ Vận tốc & Momen (Velocity and Torque): Nếu ứng dụng yêu cầu kiểm soát đồng thời cả lực kéo và tốc độ, hãy chọn giá trị
(0x000A) Velocity (V) and Torque (T).
Lưu ý quan trọng từ Tutorial:
- Luôn kiểm tra tải: Khi chạy Jog lần đầu, hãy đảm bảo động cơ không kết nối với tải nặng hoặc cơ cấu cơ khí có hành trình ngắn để tránh va chạm.
- Nút dừng khẩn cấp: Luôn chuẩn bị sẵn sàng nút E-Stop cơ vật lý bên ngoài để ngắt nguồn khi có sự cố.
- Đồng bộ hóa: Sau khi thay đổi các thông số ở mục P1-Basic, hãy nhớ nhấn Apply hoặc tải cấu hình xuống thiết bị để thay đổi có hiệu lực.
Leave a Reply